# Projetos
Licoes feitas em tutoriais da internet e livros para uso pessoal futuros
Não possuo direito em muitos codigos e nem quero, caso ache que o codigo é seu pode me contatar para que eu coloque o seu direito nele 😄
# LCD 16x2
Alguns LCD's podem nao vir com um resistor no pino 15(A/Led 1), podemos usar dois resistores de 165 Ohms sem serie
O pino 3 é usado para regular a claridade do display, se nao tiver um potenciometro ou nao quiser regular o brilho e quiser o maximo é só ligar ele no terra (Lemnrando que o mais claro da para ver um fundo nas letras)
Do pino 4 ao 6 sao os pinos de controle, por meio deles podemos informar para o arduino oq queremos que ele faca, se queremos que ele apague tudo que esta nele, pisque, ...
No pino 4 informamos para o arduino se estamos enviando o texto que sera escrito ou comandos/formatos para tratar o conteudo informado como o display ira trabalhar
O pino 5 serve para tratar se vamos receber informacoes no display ou se queremos ler o que esta no display garantindo meio que um callback da informacao, GND para somente escrita e alguma porta digital para leitura e escrita. Se nao quisermos usar ela e deixar o padrao que é somente escrita podemos ligar somente no GND, fazendo isso nao precisamos definir a porta no LiquidCrystal que ele já vai saber que nao estamos usando
O pino 6 é o pino de enable, serve para o arduino informa que esta enviando informacoes. Funciona como se fosse um botao salvar em algum programa. Quando o arduino prepara as informacoes dos pinos 7 ao 14 o pino enable quando ligado envia as informacoes para o display
Do 7 ao 14 sao pinos de dados, ou seja, vamos ligar 8 pinos que seriam 8 bits para enviar um byte por vez para o display
Se precisarmos que as informacoes sejam enviadas muito rapido do arduino para o display usamos todos os pinos de 7 ao 14 caso nao precisemos podemos desligar os pinos 7, 8, 9 e 10. A mudancao é que um bit que é de 8 bits sera enviado duas vezes é imperceptível para a maiorias dos programas
O pino 15 (anodo) e 16 (catodo) sao as luzes de fundo
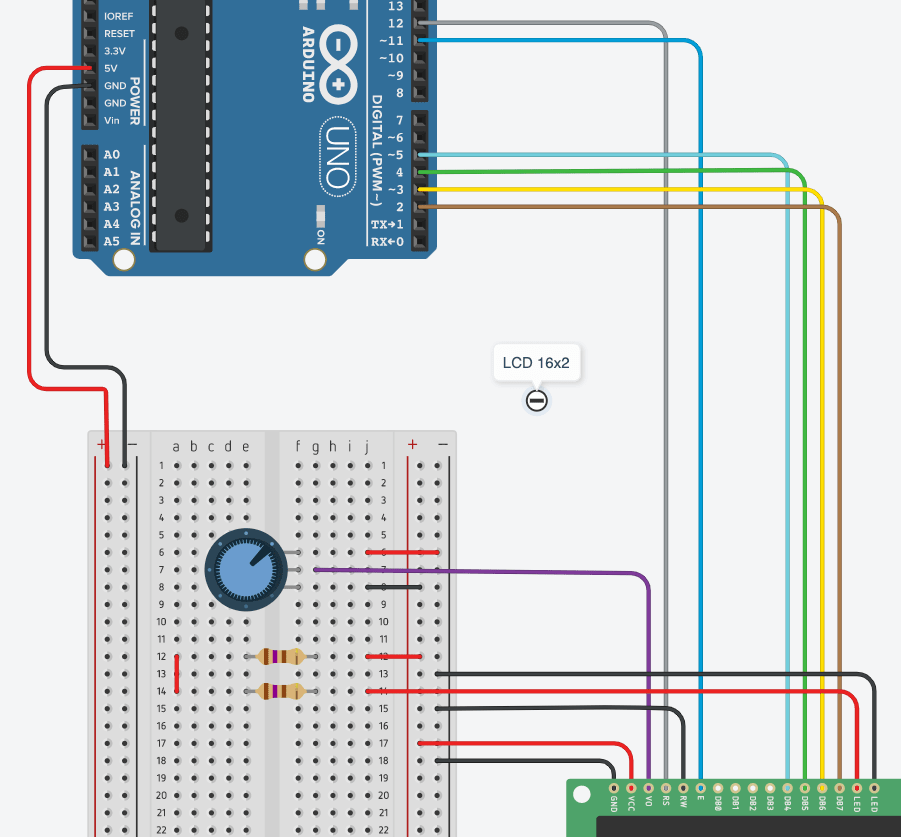
Ligacoes
| Pino LCD | Funcao | Ligacao |
|---|---|---|
| 1 | VSS | GND |
| 2 | VDD | VCC 5V |
| 3 | V0 | Pino central potenciometro (vai de 0v até 5v) |
| 4 | RS | Pino 12 Arduino |
| 5 | RW | GND |
| 6 | E | Pino 11 Arduino |
| 7 | D0 | Nao conectado |
| 8 | D1 | Nao conectado |
| 9 | D2 | Nao conectado |
| 10 | D3 | Nao conectado |
| 11 | D4 | Pino 5 Arduino |
| 12 | D5 | Pino 4 Arduino |
| 13 | D6 | Pino 3 Arduino |
| 14 | D7 | Pino 2 Arduino |
| 15 | A (led 1) | VCC 5V |
| 16 | K (led 2) | GND |
PDF Tabelas de carascteres, se atentar que existem duas tabelas. Cada display usa uma.
Codigo 1
//Carrega a biblioteca LiquidCrystal
#include <LiquidCrystal.h>
//Define os pinos que serão utilizados para ligação ao display
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);
void setup()
{
// Define o número de colunas e linhas do LCD
/*
Em alguns displays (especiais) o tamanho do caracter
é um pouco maior falando em pontos
Nos mais comuns temos cada caracter formados por 5x8:
- 5 pontos na horizontal
- 8 pontos na vertical
Em alguns outros temos 5x10
Por isso temos que passar como terceiro parametro no begin o tamanho do nosso.
Por padrao vem LCD_5X8DOTS
*/
lcd.begin(16, 2, LCD_5X10DOTS);
}
void loop()
{
//Limpa a tela
lcd.clear();
//Posiciona o cursor na coluna 3, linha 0;
lcd.setCursor(3, 0);
//Envia o texto entre aspas para o LCD
lcd.print("Linha 1");
lcd.setCursor(3, 1);
lcd.print("Linha 2");
delay(5000);
// Para imprimir um unico caracter, envolvido de aspas simples
// lcd.write('a');
//Rolagem para a esquerda
for (int posicao = 0; posicao < 3; posicao++)
{
lcd.scrollDisplayLeft();
delay(300);
}
//Rolagem para a direita
for (int posicao = 0; posicao < 6; posicao++)
{
lcd.scrollDisplayRight();
delay(300);
}
// Limapr a tela
// lcd.clear();
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
Codigo 2
#include <LiquidCrystal.h>
LiquidCrystal displayTeste(2,4,10,11,12,13);
int efeito = 0;
int contraste = 0;
boolean aumenta = true;
byte smiley[8] = {
B00000,
B10001,
B00000,
B00000,
B10001,
B01110,
B00000,
};
void setup() {
// Pino para dar o efeito igual tivesse usando um potenciomentro
pinMode(5, OUTPUT);
analogWrite(5, 0);
/*
Se queremos usar caracteres ou qualquer outra informacao usando as tabelas,
para displays AO1 (no pdf de download) é mais complicado por nao ter acentucao.
O display A01 possui todas a 16 primeiras possicoes (0 - 15) espacos reservados
para criarmos os nossos caracteres.
Para isso podemos usar o createChar passando no primeiro parametro a possicao
na tabela e como segundo argumento um array do tipo byte com 8 possicoes.
Cada possicao vamos escrever um byte no formato do caracter que queremos, com
a estrutura B00000.
Onde esta o zero podemos setar 0 ou 1, sendo 0 onde nao aparece nada e 1 onde
aparece um ponto naquele caracter.
Comeca com B pois estamos informando o formato binario.
E possui 5 colunas de um caracter, que ja falei anteriormente junto com o LCD_5X10DOTS
neste exemplo é um display LCD_5X8DOTS.
Esta criacao de caracter tem q ser antes do begin do display, para poder usar.
*/
displayTeste.createChar(0, smiley);
displayTeste.begin(16,2);
// Ligar o cursor
//displayTeste.cursor();
// Ligar o cursor tbm, com o cursor piscando
//displayTeste.blink();
// Voltar o cursor para o inicio, no setCursor(0,0);
// displayTeste.home();
displayTeste.print("Brincando com");
displayTeste.setCursor(2,1);
displayTeste.print("Ideias ");
displayTeste.write(byte(0));
//Teste da Tabela de Caracteres
displayTeste.setCursor(15,1);
// Usando a tabela em pdf de download
displayTeste.write(byte(244));
}
void loop() {
// put your main code here, to run repeatedly:
if (efeito == 1) {
analogWrite(5, contraste);
delay(20);
if (aumenta) contraste++;
else contraste--;
if (contraste == 150) aumenta = false;
if (contraste == 0) aumenta = true;
}
if (efeito == 2) {
// Ocultar o conteudo para visualizacao
displayTeste.noDisplay();
delay(500);
// Voltar o conteudo para visualizacao
displayTeste.display();
delay(500);
}
if (efeito == 3) {
// Permite o texto rolar para a esquerda, quando acabar volta
displayTeste.scrollDisplayLeft();
delay(350);
}
if (efeito == 4) {
// Permite o texto rolar para a direita, quando acabar volta
displayTeste.scrollDisplayRight();
delay(350);
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
Codigo 3
#include <LiquidCrystal.h>
LiquidCrystal displayTeste(2,4,10,11,12,13);
void setup() {
pinMode(5, OUTPUT);
analogWrite(5, 0);
displayTeste.begin(16,2);
displayTeste.blink();
}
void loop() {
displayTeste.clear();
displayTeste.home();
//displayTeste.setCursor(15,0);
// Movimento o cursor da direita para a esquerda
//displayTeste.rightToLeft();
//displayTeste.setCursor(0,0);
// Movimento o cursor da esquerda para a direita (padrao)
//displayTeste.leftToRight();
// o cursor fica fixo e somente o conteudo tem scroll
//displayTeste.autoscroll();
//displayTeste.setCursor(8,0);
// Escreve do 0 ao 9 sequencialmente
for (int c = 0; c < 10; c++) {
displayTeste.write(byte(48 + c));
delay(1000);
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
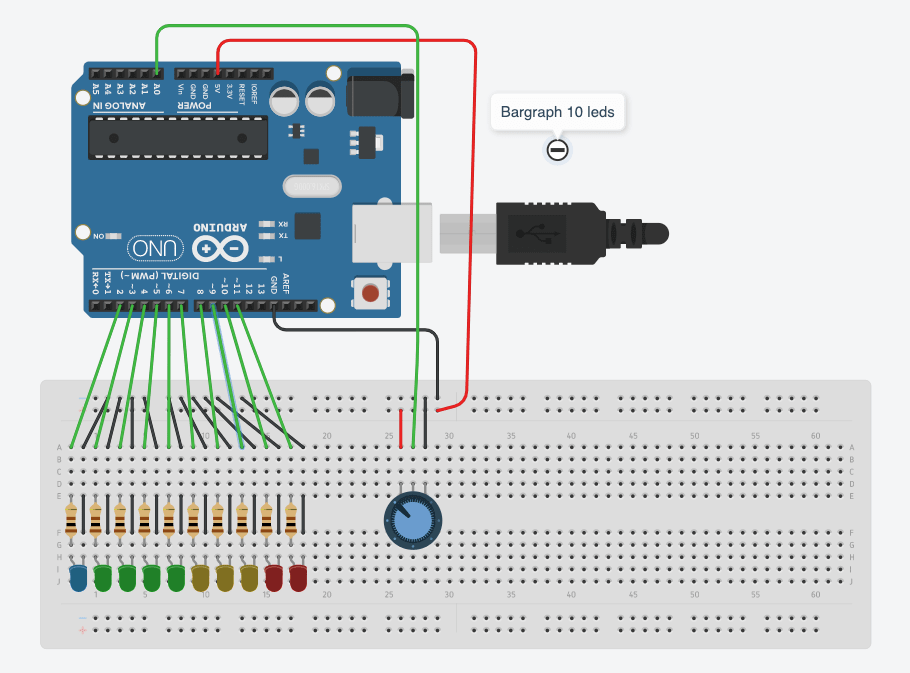
# Barra Grafica de Led
Caso nao tenha um bargraph, este tutorial mostra como montar um com leds. O sistema é o mesmo.
Codigo
//Carrega a biblioteca LiquidCrystal
#include <LiquidCrystal.h>
//Define os pinos que serão utilizados para ligação ao display
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);
void setup()
{
//Define o número de colunas e linhas do LCD
lcd.begin(16, 2);
}
void loop()
{
//Limpa a tela
lcd.clear();
//Posiciona o cursor na coluna 3, linha 0;
lcd.setCursor(3, 0);
//Envia o texto entre aspas para o LCD
lcd.print("Linha 1");
lcd.setCursor(3, 1);
lcd.print("Linha 2");
delay(5000);
//Rolagem para a esquerda
for (int posicao = 0; posicao < 3; posicao++)
{
lcd.scrollDisplayLeft();
delay(300);
}
//Rolagem para a direita
for (int posicao = 0; posicao < 6; posicao++)
{
lcd.scrollDisplayRight();
delay(300);
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
# Led RGB
As portas no arduino tem que ser as com o ~ (PWM)
Se a perna comum for catodo é só ligar no GND e caso seja anodo deve ser ligdo no 5v sem resistor
Se for anodo comum onde é 0 fica 255 e onde é 255 fica 0
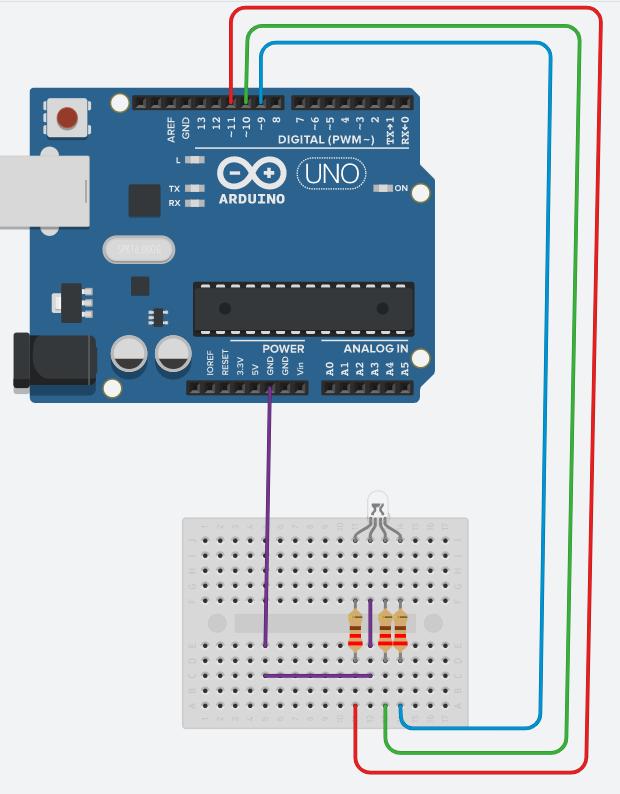
- Tensão de operação (vermelho): 2 a 2,5VDC
- Tensão de operação (verde): 3,2 a 3,6VDC
- Tensão de operação (azul): 3,2 a 3,6VDC
- Corrente de operação (em cada LED): 20mA
Como resistor para cada uma das 3 pernas nao comuns podemos ter de 220 Ohms.
O valor do analogWrite vai de 0 até 255, 0 é mais claro (invisivel) e 255 é mais escuro.
Codigo uma cor unica
int pinoR = 11;
int pinoG = 10;
int pinoB = 9;
void setup()
{
pinMode(pinoR, OUTPUT);
pinMode(pinoG, OUTPUT);
pinMode(pinoB, OUTPUT);
}
void loop()
{
analogWrite(pinoR, 255);
delay(1000);
analogWrite(pinoR, 0);
delay(1000);
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
Codigo blink
int pinoR = 11;
int pinoG = 10;
int pinoB = 9;
void setup()
{
pinMode(pinoR, OUTPUT);
pinMode(pinoG, OUTPUT);
pinMode(pinoB, OUTPUT);
}
void loop()
{
analogWrite(pinoR, 255);
delay(1000);
analogWrite(pinoR, 0);
analogWrite(pinoG, 255);
delay(1000);
analogWrite(pinoG, 0);
analogWrite(pinoB, 255);
delay(1000);
analogWrite(pinoB, 0);
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
Codigo anodo comum
boolean anodo_comum = false;
int pinoR = 11;
int pinoG = 10;
int pinoB = 9;
void setup()
{
pinMode(pinoR, OUTPUT);
pinMode(pinoG, OUTPUT);
pinMode(pinoB, OUTPUT);
}
void loop()
{
setCor(255, 0, 0);
delay(1000);
setCor(0, 255, 0);
delay(1000);
setCor(0, 0, 255);
delay(1000);
}
void setCor(int vermelho, int verde, int azul) {
if (anodo_comum == true) {
vermelho = 255 - 0;
verde = 255 - 0;
azul = 255 - 0;
}
analogWrite(pinoR, vermelho);
analogWrite(pinoG, verde);
analogWrite(pinoB, azul);
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
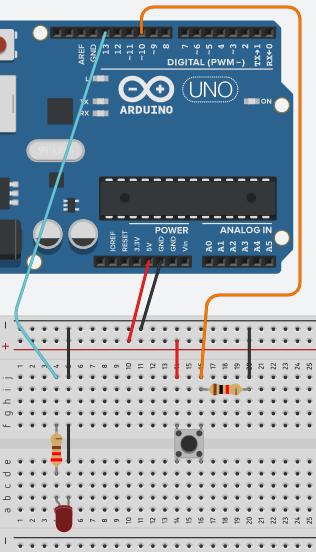
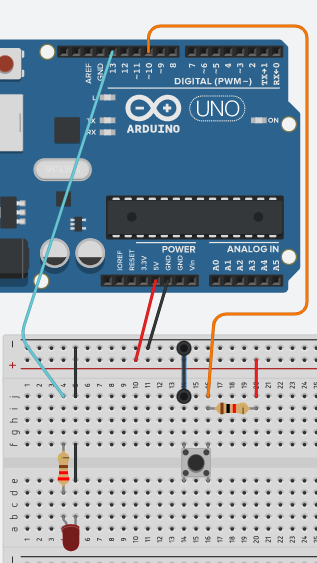
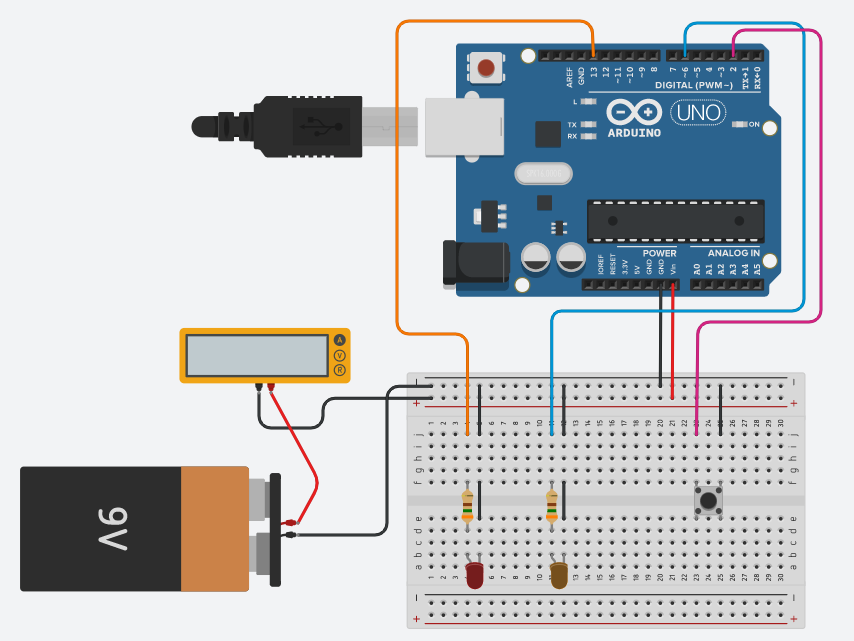
# Chave Táctil ou Push Button
Conduz somente quando está pressionado
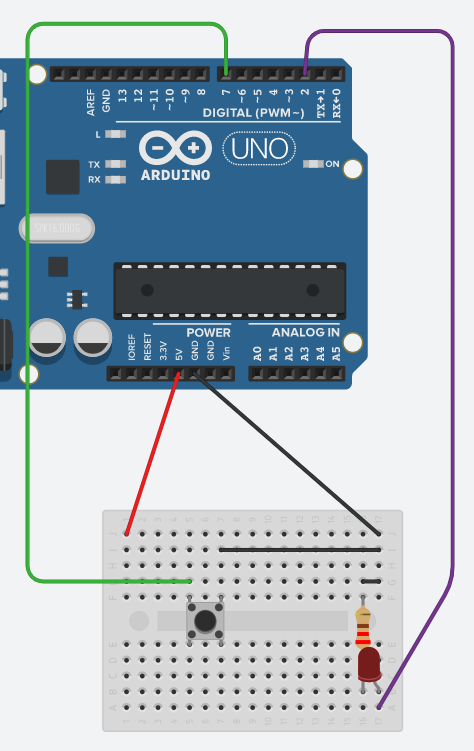
- Tensão máxima: 12VDC
- Corrente máxima: 50mA
Uma coisa importante para se lembrar é usar um resistor na entrada ligado no terra para evitar a alta impedancia/flutuacao na porta logica pois o circuito podendo ser ativado tbm pela imterferencia do ambiente consideranco o que ele quiser, tanto zero como um e ficar nesta troca constante.
Este resistor que quando vai para o terra é chamado do resistor de PULL-DOWN, que é quando vamos enviar 5v para dizer que foi precionado. É um resistor comum, nada especial.
Este resistor que quando vai para o 5v é chamado do resistor de PULL-UP, que é quando vamos enviar 0v para dizer que foi precionado. É um resistor comum, nada especial.
Não tem um valor ideal para o resistor, mas podemos usar um resistor sempre abaixo de 1k Ohm (830 ohm, 510 ohm, ...). Tambem podemos usar um de 10k que tbm vai funcionar.
Pull-Down (Vara evitar que a porta ache que esta ligada sendo que nao esta)
int led = 13;
int btPullDown = 10;
void setup()
{
pinMode(led, OUTPUT);
pinMode(btPullDown, INPUT);
digitalWrite(led, LOW);
}
void loop()
{
if(digitalRead(btPullDown) == HIGH){
// Acende led
digitalWrite(led, HIGH);
} else {
// Apaga led
digitalWrite(led, LOW);
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
Pull-Up (Vara evitar que a porta ache que nao esta ligada sendo que esta.
No arduino internamente já existe este resistor, para usar basta definir o pinMode(pino, INPUT_PULLUP).
int led = 13;
int btPullUp = 10;
void setup()
{
pinMode(led, OUTPUT);
pinMode(btPullDown, btPullUp);
digitalWrite(led, LOW);
}
void loop()
{
if(digitalRead(btPullDown) == LOW){
// Acende led
digitalWrite(led, HIGH);
} else {
// Apaga led
digitalWrite(led, LOW);
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
Exemplos
Aperta para ligar e solta para desligar
int pinoBotao = 7;
int pinoLed = 2;
void setup() {
// Define o pino como entrada _PULLUP
// Serve para ativar o resistor interno do arduino garantindo que nao tenha
// flutuacao entre 0 (LOW) e 1 (HIGH)
pinMode(pinoBotao, INPUT_PULLUP);
// Pino de saida
pinMode(pinoLed, OUTPUT);
// Led inicia desligado
digitalWrite(pinoLed, LOW);
}
void loop(){
// Verifica se o o botao é LOW
if(digitalRead(pinoBotao) == LOW){
// Acende led
digitalWrite(pinoLed, HIGH);
// Colocando um delay ao desligar
delay(2000);
} else {
// Apaga led
digitalWrite(pinoLed, LOW);
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
Ligado intermitente
int pinoBotao = 7;
int pinoLed = 2;
boolean ligado = false;
void setup() {
// Define o pino como entrada _PULLUP
// Serve para ativar o resistor interno do arduino garantindo que nao tenha
// flutuacao entre 0 (LOW) e 1 (HIGH)
pinMode(pinoBotao, INPUT_PULLUP);
// Pino de saida
pinMode(pinoLed, OUTPUT);
// Led inicia desligado
digitalWrite(pinoLed, LOW);
}
void loop(){
// Verifica se o o botao é LOW
if(digitalRead(pinoBotao) == LOW){
// Evitando ficar lendo a porta do botao apos ser precionado
delay(500);
switch(ligado) {
case false:
// Apagando led
digitalWrite(pinoLed, HIGH);
ligado = true;
break;
case true:
// Acende led
digitalWrite(pinoLed, LOW);
ligado = false;
// Colocando um delay ao desligar
delay(2000);
break;
}
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
Outra forma de ligar o botao é direto no 5v e a outra ponta em alguma porta, mas antes da saida para esta outra porta tem que ter um resistor de 10K e onde uma ponta vai estar na saida do botao e a outra no GND.
Este resistor com o GND serve para fechar um curto mas evitando queimar a placa já que pode passar uma tensao grande direto.
Exemplo
int pinoBotao = 7;
int pinoLed = 2;
int click = 0;
void setup() {
pinMode(pinoBotao, INPUT);
pinMode(pinoLed, OUTPUT);
}
void loop(){
click = digitalRead(pinoBotao);
if(click == HIGH){
digitalWrite(pinoLed, HIGH);
delay(1000);
} else {
digitalWrite(pinoLed, LOW);
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
# Buzzer
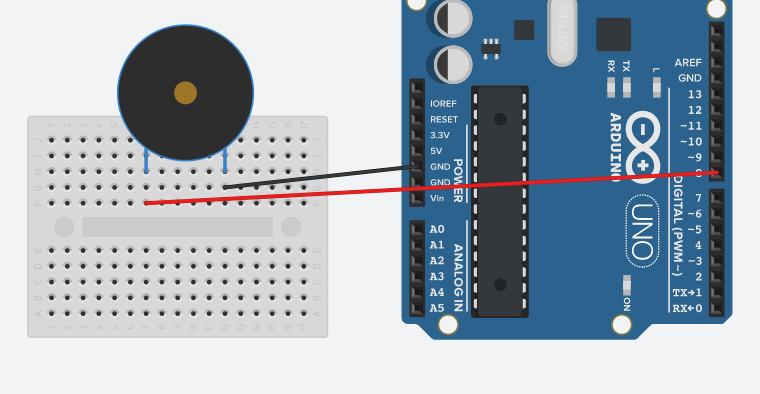
- Tensão de operação: 3,5 - 5V
Exemplos basico
int pinoBuzzer = 8;
void setup() {
pinMode(pinoBuzzer, OUTPUT);
}
void loop(){
digitalWrite(pinoBuzzer, HIGH);
delay(150);
digitalWrite(pinoBuzzer, LOW);
delay(2000);
}
2
3
4
5
6
7
8
9
10
11
Exemplos com Tom
int pinoBuzzer = 8;
void setup() {
pinMode(pinoBuzzer, OUTPUT);
}
void loop(){
// Emitir tom
tone(pinoBuzzer, 2500, 100);
delay(1000);
// Parar tom
noTone(pinoBuzzer);
}
2
3
4
5
6
7
8
9
10
11
12
13
14
int pinoBuzzer = 8;
void setup() {
pinMode(pinoBuzzer, OUTPUT);
}
void loop(){
tone(pinoBuzzer, 1500);
delay(200);
tone(pinoBuzzer, 2000);
delay(200);
}
2
3
4
5
6
7
8
9
10
11
Exemplo da musica do star wars (opens new window)
# Potenciomentro
Tem seus numeros de 0 até 1023 (Ou seja, tem 1024 possicoes)
Nada mais é do que um resistor com a resistencia variavel
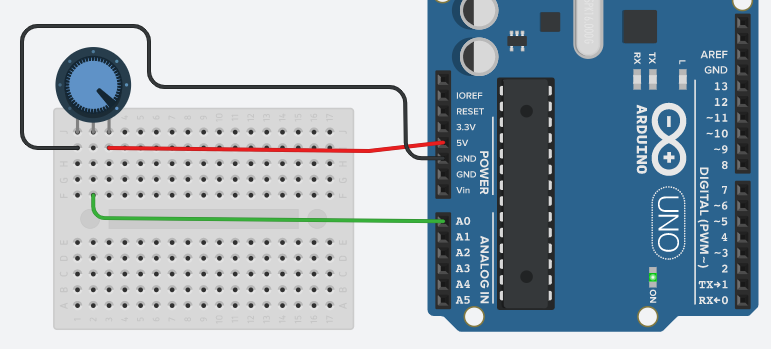
Exemplo basico
void setup()
{
Serial.begin(9600);
}
void loop()
{
Serial.println(analogRead(A0));
delay(200);
}
2
3
4
5
6
7
8
9
10
Exemplo basico 2
Imprimindo apenas quando alterar o numero e validando a variacao para mais ou menos que sempre tem com ele parado/girando
int leitura1 = 0;
int leitura2 = 0;
void setup()
{
Serial.begin(9600);
}
void loop()
{
leitura1 = analogRead(A0);
// O +2 da (leitura2 + 2) é para pegar a variacao pra mais ou menos que existe até com ele parado
if (leitura1 > (leitura2 + 2) || leitura1 < (leitura2 - 2)) {
// Salvando o proximo ciclo do loop se nao nunca roda
leitura2 = leitura1;
Serial.println(leitura1);
delay(100);
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
Exemplo alterando a claridade do led
O Led precisa estar em uma porta PWM

int led = 3;
int valor_potencimetro = 0;
int brilho = 0;
void setup()
{
pinMode(led, OUTPUT);
}
void loop()
{
valor_potencimetro = analogRead(A0);
// Map serve basicamente para fazer uma regra de tres em dois valores
/*
Recebe
- Um valor
- um valor de
- um valor para
- um valor equivalente de
- um valor equivalente para
*/
brilho = map(valor_potencimetro, 0, 1023, 0, 255);
analogWrite(led, brilho);
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
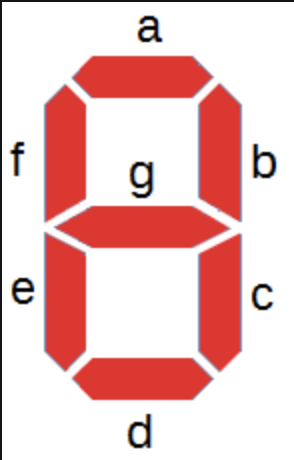
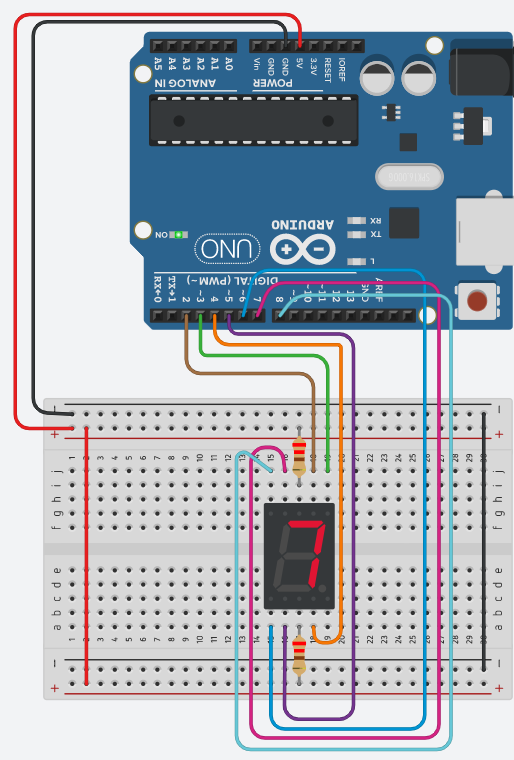
# Display 7 Segmentos
De cada lado possui 5 pinos, o que fica no meio é o positivo/negativo (olhar na descricao quando comprar qual é a configuracao dele)
Pode se usar um resistor de 220 Ohms em cada segmento
Com o ponto
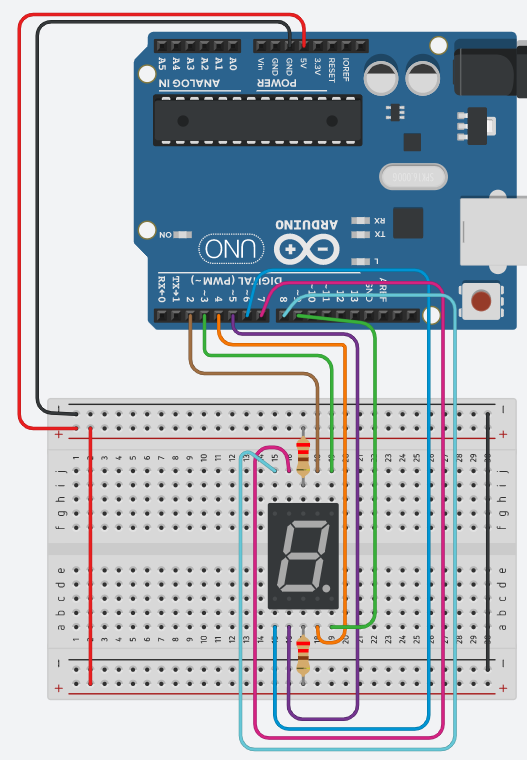
- Tensão de operação: 5VDC
- Corrente de operação: 30mA
- Potência dissipada: 60mW
- Configuração: anodo comum
Exemplo basico
int segA = 2;
int segB = 3;
int segC = 4;
int segD = 5;
int segE = 6;
int segF = 7;
int segG = 8;
int segDot = 9;
void setup()
{
pinMode(segA, OUTPUT);
pinMode(segB, OUTPUT);
pinMode(segC, OUTPUT);
pinMode(segD, OUTPUT);
pinMode(segE, OUTPUT);
pinMode(segF, OUTPUT);
pinMode(segG, OUTPUT);
pinMode(segDot, OUTPUT);
}
void loop()
{
digitalWrite(segA, LOW);
digitalWrite(segB, LOW);
digitalWrite(segC, LOW);
digitalWrite(segD, HIGH);
digitalWrite(segE, HIGH);
digitalWrite(segF, HIGH);
digitalWrite(segG, HIGH);
digitalWrite(segDot, 0);
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
Exemplo contador de 0 - 9
int a = 2, b = 3, c = 4, d = 5, e = 6, f = 7, g = 8;
// Recebe a quantidade de linhas e colunas que a matriz vai ter
// 10 linhas pq podemos fazer de 0 - 9
// 7 pq temos 7 variaveis/segmentos para ligar
int num[10][7]{
{a,b,c,d,e,f}, // numero 0
{b,c}, // numero 1
{a,b,d,e,g}, // numero 2
{a,b,c,d,g}, // numero 3
{b,c,f,g}, // numero 4
{a,c,d,f,g}, // numero 5
{a,c,d,e,f,g}, // numero 6
{a,b,c}, // numero 7
{a,b,c,d,e,f,g}, // numero 8
{a,b,c,f,g} // numero 9
};
void setup()
{
pinMode(a, OUTPUT);
pinMode(b, OUTPUT);
pinMode(c, OUTPUT);
pinMode(d, OUTPUT);
pinMode(e, OUTPUT);
pinMode(f, OUTPUT);
pinMode(g, OUTPUT);
}
void loop()
{
for (int i = 0; i < 10; i++) {
apaga();
numero(i);
delay(1000);
}
}
// Apagar todos os segmentos do display
void apaga() {
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
}
// Formar um numero
void numero(int n) {
for (int i = 0; i < 7; i++) {
digitalWrite(num[n][i], LOW);
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
Exemplo contador de 0 - 9
Retirado de blogmasterwalkershop.com.br (opens new window)
Todos os direitos reservado ao do DONO blogmasterwalkershop.com.br
byte seven_seg_digits[16][7] = {
{ 0,0,0,0,0,0,1 }, //DIGITO 0
{ 1,0,0,1,1,1,1 }, //DIGITO 1
{ 0,0,1,0,0,1,0 }, //DIGITO 2
{ 0,0,0,0,1,1,0 }, //DIGITO 3
{ 1,0,0,1,1,0,0 }, //DIGITO 4
{ 0,1,0,0,1,0,0 }, //DIGITO 5
{ 0,1,0,0,0,0,0 }, //DIGITO 6
{ 0,0,0,1,1,1,1 }, //DIGITO 7
{ 0,0,0,0,0,0,0 }, //DIGITO 8
{ 0,0,0,1,1,0,0 }, //DIGITO 9
{ 0,0,0,1,0,0,0 }, //DIGITO A
{ 1,1,0,0,0,0,0 }, //DIGITO B
{ 0,1,1,0,0,0,1 }, //DIGITO C
{ 1,0,0,0,0,1,0 }, //DIGITO D
{ 0,1,1,0,0,0,0 }, //DIGITO E
{ 0,1,1,1,0,0,0 } //DIGITO F
};
void setup(){
pinMode(2, OUTPUT); //PINO 2 -> SEGMENTO A
pinMode(3, OUTPUT); //PINO 3 -> SEGMENTO B
pinMode(4, OUTPUT); //PINO 4 -> SEGMENTO C
pinMode(5, OUTPUT); //PINO 5 -> SEGMENTO D
pinMode(6, OUTPUT); //PINO 6 -> SEGMENTO E
pinMode(7, OUTPUT); //PINO 7 -> SEGMENTO F
pinMode(8, OUTPUT); //PINO 8 -> SEGMENTO G
pinMode(9, OUTPUT); //PINO 9 -> SEGMENTO PONTO
ligaPonto(0);
}
void ligaPonto(byte dot){ //FUNÇÃO QUE ACIONA O PONTO DO DISPLAY
digitalWrite(9, dot);
}
void ligaSegmentosDisplay(byte digit){ //FUNÇÃO QUE ACIONA O DISPLAY
byte pino = 2;
for (byte contadorSegmentos = 0; contadorSegmentos < 7; ++contadorSegmentos){ //PARA "contadorSegmentos"
//IGUAL A 0, ENQUANTO "contadorSegmentos" MENOR QUE 7, INCREMENTA "contadorSegmentos"
digitalWrite(pino, seven_seg_digits[digit][contadorSegmentos]); //PERCORRE O ARRAY E LIGA OS
//SEGMENTOS CORRESPONDENTES AO DIGITO
++pino; //INCREMENTA "pino"
}
ligaPonto(1); //LIGA O PONTO DO DISPLAY
delay(100); //INTERVALO DE 100 MILISSEGUNDOS
ligaPonto(0); //DESLIGA O PONTO DO DISPLAY
}
//MÉTODO RESPONSÁVEL PELA CONTAGEM DE 0 A 9 E CONTAGEM DE "A" ATÉ "F" (NA CONTAGEM HEXADECIMAL "A"=10
// "B"=11 / "C"=12 / "D"=13 / "E"=14 / "F"=15)
void loop() {
for (byte contador = 0; contador < 16; contador++){ //PARA "contador"
//IGUAL A 0, ENQUANTO "contador" MENOR QUE 16, INCREMENTA "contador"
delay(500); //INTERVALO DE 500 MILISSEGUNDOS
ligaSegmentosDisplay(contador); //FAZ A CONTAGEM
}
delay(2000); //INTERVALO DE 2 SEGUNDOS
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
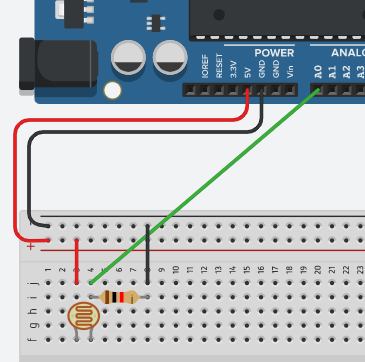
# Luminosidade
Nao é polarizado
- Luminosidade: LDR (ligado com um resistor de 10k)
- Tensão de operação (máxima): 150VDC
- Potência máxima: 100mW
O valor de retorno do LDR pode ser de 0 até 1023.
int valor = 0;
void setup()
{
Serial.begin(9600);
}
void loop()
{
valor = analogRead(A0);
Serial.println(valor);
delay(500);
}
2
3
4
5
6
7
8
9
10
11
12
13
# Temperatura
Nao é polarizado
Onde montei o desenho nao tinha o NTC ai coloquei um capacitor apenas para ilustrar e parecer mais ou MENOSSS igual
- Temperatura: NTC 10K (ligado com um resistor de 10k)
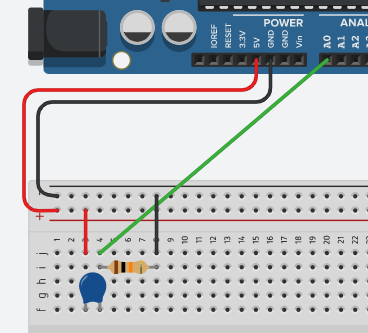
- Tensão de operação: 3,3 ou 5VDC
- Faixa de medição: -55°C a 125° celsius
- Precisão: ±1%
Download da biblioteca.
Para instalar a biblioteca, Sketch > Incluir Biblioteca > Adicionar .zip
#include <Thermistor.h>
Thermistor temp(A0);
void setup()
{
Serial.begin(9600);
}
void loop()
{
int temperatura = temp.getTemp();
Serial.print("Temperatura: ");
Serial.print(temperatura);
Serial.println(" C");
delay(1000);
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
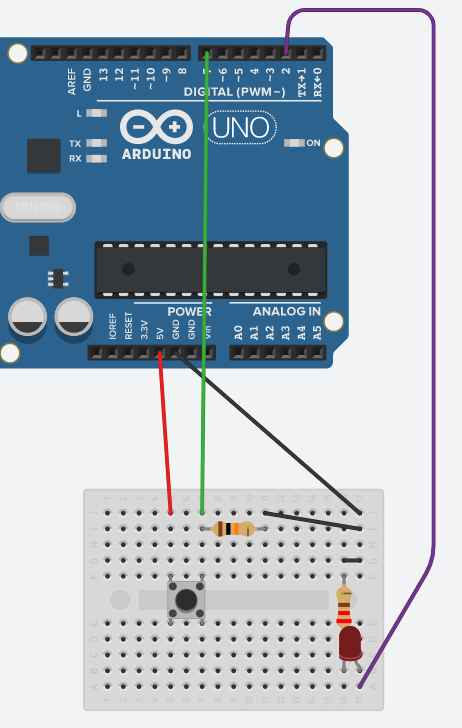
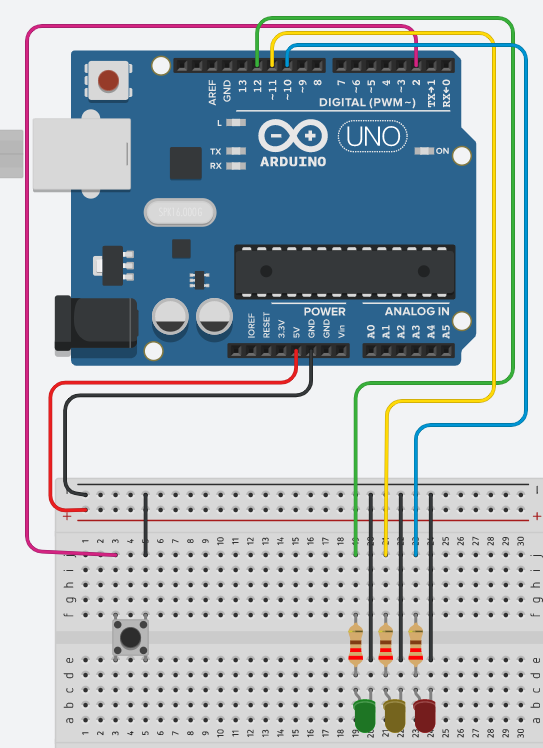
# Interrupcao
Interrompe o que esta fazendo para fazer outra coisa e depois que terminar volta de onde parou
Somente as portas 2 (interrupcao 0) e 3 (interrupcao 1) no Arduino Uno podem acionar a interrupcao
Se em algum modulo tiver a sigla IRT é pq tem um acionador de interrupcao
A funcao que efetua a interrupcao é a attachInterrupt(numero interrupcao, funcao, forma).
O numero interrupcao é 0 ou 1 que representam as portas. Podemos passar a porta dentro de uma funcao que faz a traducao.
A funcao que faz a traducao é a digitalPinToInterrupt(porta), ela retorna 0 para a porta 2 e 1 para a porta 3.
Ele possibilita 4 formas de interrupcao:
- RISING: Executa a interrupcao quando porta for do estado LOW para HIGH
- FALLING: Executa a interrupcao quando porta for do estado HIGH para LOW
- LOW: Executa a interrupcao enquanto a porta estiver no estado LOW
- CHANGE: Executa a interrupcao quando a porta tiver uma mundaca de estado de LOW para HIGH e de HIGH para LOW
#define pinVerde 12
#define pinAmarelo 11
#define pinVermelho 10
#define pinBotao 2
void botaoAcionado();
void setup() {
pinMode(pinVerde, OUTPUT);
pinMode(pinAmarelo, OUTPUT);
pinMode(pinVermelho, OUTPUT);
pinMode(pinBotao, INPUT_PULLUP);
attachInterrupt(digitalPinToInterrupt(pinBotao), botaoAcionado, RISING);
}
void loop() {
digitalWrite(pinVerde, HIGH);
digitalWrite(pinAmarelo, LOW);
delay(1000);
digitalWrite(pinVerde, LOW);
digitalWrite(pinAmarelo, HIGH);
delay(1000);
// Para desligar a permissao de interrupcao e depois de algumas acoes do codigo permitir
noInterrupts();
// Outros codigos qualquer
// Para ligar a permissao de interrupcao novamente
interrupts();
// Para fazer uma interrupcao nao funcionar depois de certo ponto no codigo
detachInterrupt(numero interrupcao)
}
void botaoAcionado() {
static bool estado = LOW;
static unsigned long delayEstado;
if ( (millis() - delayEstado) > 100 ) {
estado = !estado;
delayEstado = millis();
}
digitalWrite(pinVermelho, estado);
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
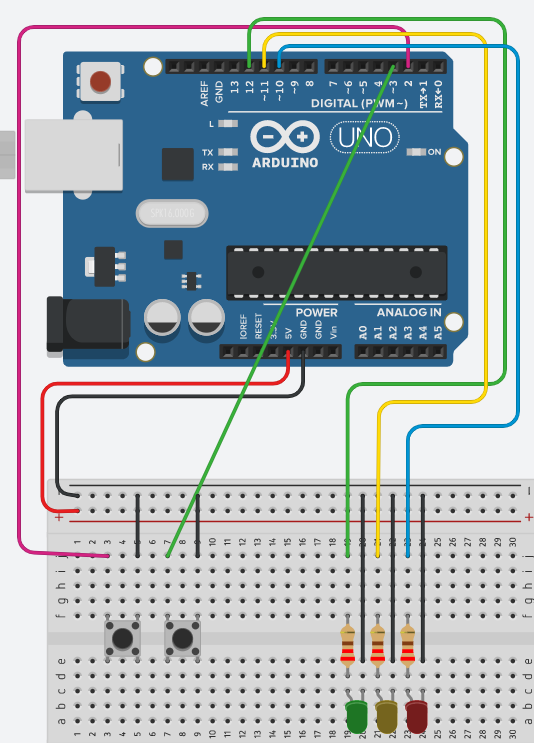
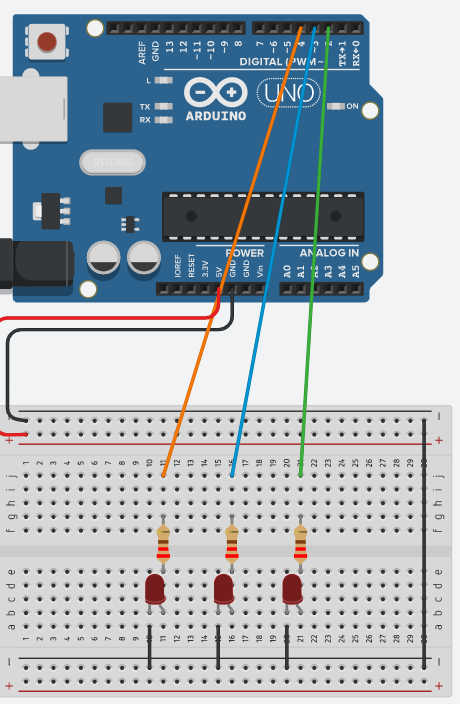
# Multitarefa
Permite rodar varias tarefas ao mesmo tempo
Ao fazer multitarefa nao usar o delay() no loop() e em nenhuma outra funcao pois ele trava o arduino e nao permite fazer mais nada
#define pinLed1 12
#define pinLed2 11
#define pinLed3 10
#define pinBotao1 2
#define pinBotao2 3
void controlaLed1();
void controlaLed2();
void controlaLed3();
void setup() {
pinMode(pinLed1, OUTPUT);
pinMode(pinLed2, OUTPUT);
pinMode(pinLed3, OUTPUT);
pinMode(pinBotao1, INPUT_PULLUP);
pinMode(pinBotao2, INPUT_PULLUP);
}
void loop() {
controlaLed1();
controlaLed2();
controlaLed3();
}
void controlaLed1() {
static unsigned long delayPisca;
// Menor que 500 milisegundos
if ( (millis() - delayPisca) < 500 ) {
digitalWrite(pinLed1, HIGH);
} else {
digitalWrite(pinLed1, LOW);
}
if ( (millis() - delayPisca) >= 1000 ) {
delayPisca = millis();
}
}
void controlaLed2() {
digitalWrite(pinLed2, !digitalRead(pinBotao1) );
}
void controlaLed3() {
static byte estado = 1;
static unsigned long delayBouce;
static bool estadoBotao = true;
static bool estadoAntBotao = true;
static unsigned long delayPisca;
estadoBotao = digitalRead(pinBotao2);
if ((!estadoBotao && estadoAntBotao) && ((millis() - delayBouce) > 100)) {
estado++;
if (estado > 3) {
estado = 1;
}
delayBouce = millis();
}
estadoAntBotao = estadoBotao;
switch (estado) {
case 1: {
digitalWrite( pinLed3, LOW);
break;
}
case 2: {
digitalWrite( pinLed3, HIGH);
break;
}
case 3: {
if ( (millis() - delayPisca) < 200 ) {
digitalWrite( pinLed3, HIGH);
}
if ( ((millis() - delayPisca) >= 200) && ((millis() - delayPisca) < 400) ) {
digitalWrite( pinLed3, LOW);
}
if ( ((millis() - delayPisca) >= 400) && ((millis() - delayPisca) < 600) ) {
digitalWrite( pinLed3, HIGH);
};
if ( ((millis() - delayPisca) >= 600) && ((millis() - delayPisca) < 800) ) {
digitalWrite( pinLed3, LOW);
}
if ( (millis() - delayPisca) > 1800 ) {
delayPisca = millis();
}
break;
}
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
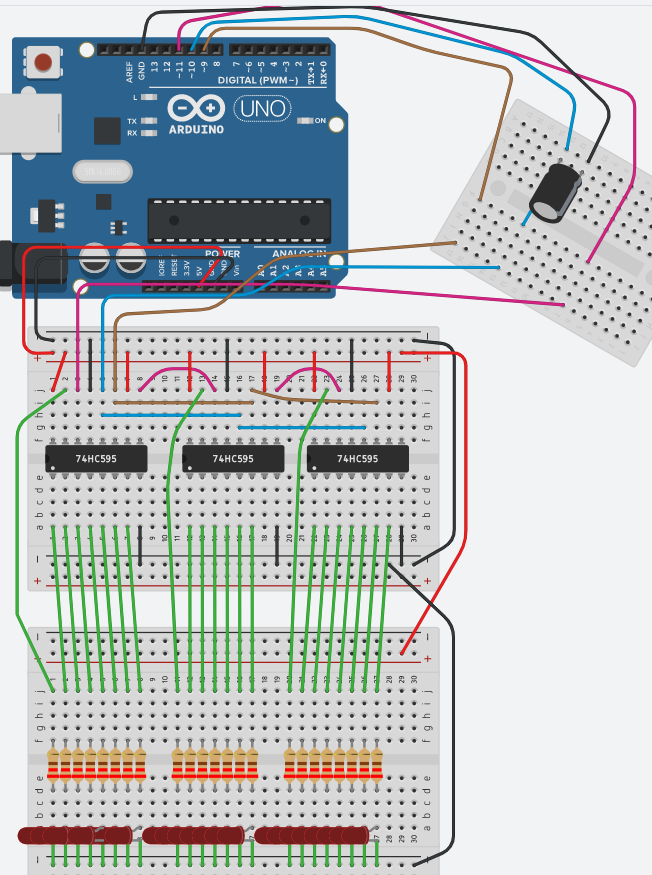
# Expandindo portas (CI c/ funcao Shift Register)
Ligando com 3 portas digitais no arduino ele permite controlar 8 portas digitais no modo OUTPUT
- O capacitor na porta 12 é para se existir alguma variacao na porta nao vai interferir na comunicao, capacitor apenas para estabilizacao da comunicacao usar um de 1uf
- A porta 14 do primeiro quando tem mais de um ci ligado fica responsavel por controlar a ordem das portas e mandando pela sua porta 9 a informacao para a porta 14 do proximo ci e assim por diante para todos os ci's que tiverem
#define pinSH_CP 9 //Pino Clock
#define pinST_CP 10 //Pino Latch
#define pinDS 11 //Pino Data
#define qtdeCI 3
void ci74HC595Write(byte pino, bool estado);
void setup() {
pinMode(pinSH_CP, OUTPUT);
pinMode(pinST_CP, OUTPUT);
pinMode(pinDS, OUTPUT);
}
void loop() {
for (int nL=0; nL<24; nL++) {
ci74HC595Write(nL, HIGH);
delay(100);
ci74HC595Write(nL, LOW);
}
for (int nL=0; nL<8; nL++) {
ci74HC595Write(nL, HIGH);
}
delay(1000);
for (int nL=0; nL<8; nL++) {
ci74HC595Write(nL, LOW);
}
for (int nL=8; nL<16; nL++) {
ci74HC595Write(nL, HIGH);
}
delay(1000);
for (int nL=8; nL<16; nL++) {
ci74HC595Write(nL, LOW);
}
for (int nL=16; nL<24; nL++) {
ci74HC595Write(nL, HIGH);
}
delay(1000);
for (int nL=16; nL<24; nL++) {
ci74HC595Write(nL, LOW);
}
delay(500);
for (int nP=0; nP<5; nP++) {
for (int nL=0; nL<24; nL++) {
ci74HC595Write(nL, HIGH);
}
delay(100);
for (int nL=0; nL<24; nL++) {
ci74HC595Write(nL, LOW);
}
delay(100);
}
delay(400);
for (int nP=0; nP<3; nP++) {
for (int nL=0; nL<24; nL++) {
ci74HC595Write(nL, HIGH);
delay(10);
}
for (int nL=23; nL>=0; nL--) {
ci74HC595Write(nL, LOW);
delay(10);
}
}
}
void ci74HC595Write(byte pino, bool estado) {
static byte ciBuffer[qtdeCI];
bitWrite(ciBuffer[pino / 8], pino % 8, estado);
digitalWrite(pinST_CP, LOW); //Inicia a Transmissão
digitalWrite(pinDS, LOW); //Apaga Tudo para Preparar Transmissão
digitalWrite(pinSH_CP, LOW);
for (int nC = qtdeCI-1; nC >= 0; nC--) {
for (int nB = 7; nB >= 0; nB--) {
digitalWrite(pinSH_CP, LOW); //Baixa o Clock
digitalWrite(pinDS, bitRead(ciBuffer[nC], nB) ); //Escreve o BIT
digitalWrite(pinSH_CP, HIGH); //Eleva o Clock
digitalWrite(pinDS, LOW); //Baixa o Data para Previnir Vazamento
}
}
digitalWrite(pinST_CP, HIGH); //Finaliza a Transmissão
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
# Monitor Serial
Exemplo ligando led com arduino recebendo dado via monitor serial. Mandar de 1 até 3 no monitor serial para ligar os leds, pode mandar varios ao mesmo tempo
// Recebe as informacoes da serial
int recebido = 0;
// Setando o valor inicial e nao as portas
int statusLed1 = LOW;
int statusLed2 = LOW;
int statusLed3 = LOW;
void setup()
{
Serial.begin(9600);
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
}
void loop()
{
// Verificando se a serial foi iniciada e tem alguma informacao
if (Serial.available() > 0) {
// Recebendo valores
recebido = Serial.read();
// Verificar o que veio
switch (recebido) {
case '1':
if (statusLed1 == HIGH) {statusLed1 = LOW;} else {statusLed1 = HIGH;}
digitalWrite(2, statusLed1);
break;
case '2':
if (statusLed2 == HIGH) {statusLed2 = LOW;} else {statusLed2 = HIGH;}
digitalWrite(3, statusLed2);
break;
case '3':
if (statusLed3 == HIGH) {statusLed3 = LOW;} else {statusLed3 = HIGH;}
digitalWrite(4, statusLed3);
break;
}
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
# Servo motor
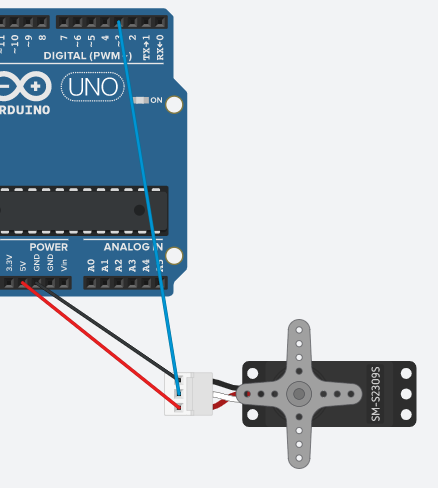
Possui tres fios:
- vermelho: Alimentacao do servo (Tensão positiva), varia de motor para motor.
- marrom/preto: GND
- amarelo/outra cor: Sinal, onde envia o possicionamento (anglo que vai de 0 até 180 graus) do motor
Para trabalhar com servo é preciso usar a biblioteca que ja vem com a IDE do Arduino, a Servo.h
Exemplo com servo de 5v
// Biblioteca de servo motor
#include <Servo.h>
// Instanciando a classe Servo passando um nome
Servo motor1;
// Angulo de inclinacao/possicao do eixo do motor
int possicaoMotor = 0;
void setup()
{
// Informando qual o pino que o motor esta
motor1.attach(3);
}
void loop()
{
// Definindo a possicao do eixo
// O valor vai de 0 até 180 (graus)
motor1.write(10);
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
Exemplo com servo de 5v rotacionando de 0 até 180 acrescentando 45 graus por rotacao
// Biblioteca de servo motor
#include <Servo.h>
// Instanciando a classe Servo passando um nome
Servo motor1;
// Angulo de inclinacao/possicao do eixo do motor
int possicaoMotor = 0;
void setup()
{
// Informando qual o pino que o motor esta
motor1.attach(3);
}
void loop()
{
// No final retorna para a possicao inicial e comecao novamente o loop
for (possicaoMotor = 0; possicaoMotor < 180; possicaoMotor+=45) {
motor1.write(possicaoMotor);
delay(2000);
}
for (possicaoMotor = 180; possicaoMotor > 0; possicaoMotor-=45) {
motor1.write(possicaoMotor);
delay(2000);
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
# Display OLED (Direitos Flavio Guimaraes)
Existem o I2C e o SPI
- I2C: Duas portas apenas para comunicao (No UNO são a A4'SDA' e A5'SCL')
- SPI: Varias portas para comunicao
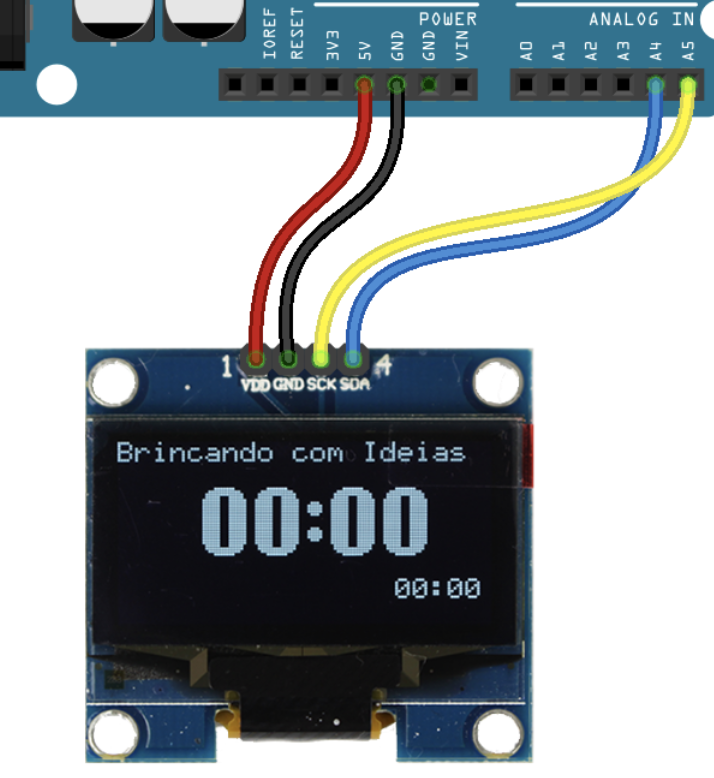
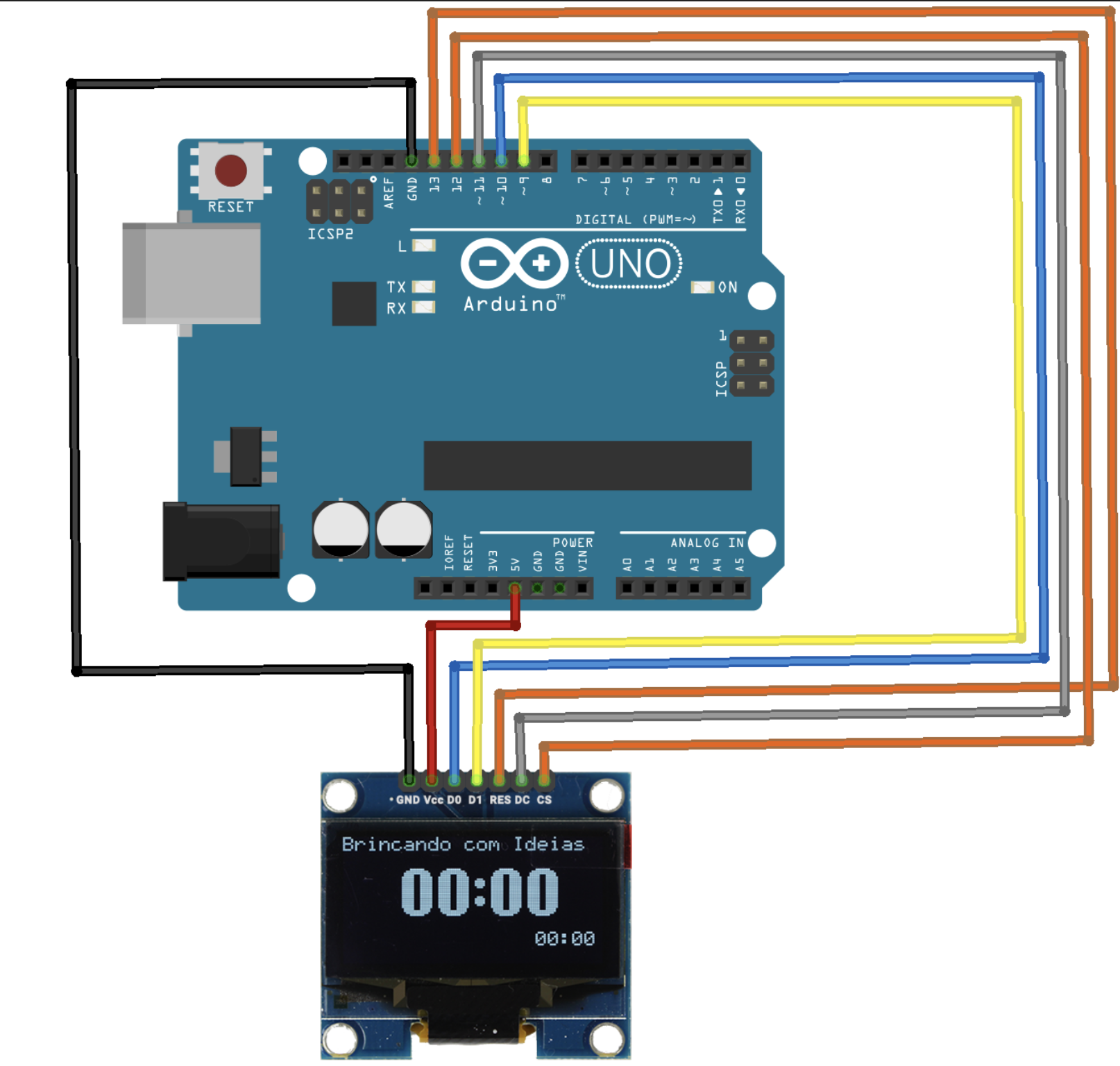
Exemplo usando o modelo 1 (I2C)
Para poder desenvolver, baixar a biblioteca MicroLCD e o programa (LCD Assistant)[/LCDAssistant.zip] para gerar o ... da imagem .
/****************************************************************************************
Video Q0174 - Módulos para Arduino - Micro LCD OLED
Desenvolvido pela Fábrica de Programas - Brincando com Ideias (www.brincandocomideias.com)
www.youtube.com/c/BrincandoComIdeias
Autor Flavio Guimaraes
*****************************************************************************************/
//BIBLIOTECAS
#include <Arduino.h>
#include <Wire.h>
#include <MicroLCD.h>
//CONFIGURACAO DO DISPLAY MICRO LCD
// Verificar qual o Controlador do seu display (LCD_SH1106 ou LCD_SSD1306)
LCD_SH1106 lcd; /* para módulo controlado pelo CI SH1106 OLED */
//LCD_SSD1306 lcd; /* para módulo contralado pelo CI SSD1306 OLED */
// Exemplo de como mandar uma img para o display
// Array de um byte em HEX, a soma de todos vai dar 48px x 48px
// Pegar uma img e converter para monocromatico (bmp monocromatico), usar ela no LCD Assistant
// Depois no porgrama ainda deixe em Byte orientation como vertical
// Depois os tamanhos 48 x 48
// Depois Size endianness com Litlle
// Depois de em Pixels deixe com 8
// Deppis de um nome (Sera usado como o nome do array)
// Depois File > Save
// Abra o arquivo com o bloco de notas e copie o conteudo e altere dentro deste array
// Atentar que deve ser uma const pois nunca muda, armazenada na PROGMEM para nao acabar com a memoria do arduino e é do tipo inteiro uint8_t
/*
Este calculo de dentro do array é o seguinte
Digamos que tenho uma img 10x10, logo vai dar 100 que é 100px
Dividindo por 8, pois dentro de cada byte tem a informacao de 8px,
ou seja, um byte é igual 8 bit e um px monocromatico é 8bit
*/
const PROGMEM uint8_t logo[48 * 48 / 8] = {
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0xC0, 0xC0, 0xE0, 0xE0,
0xF0, 0xF0, 0xF8, 0xF8, 0xF8, 0xF8, 0xF8, 0x18, 0x18, 0xF8, 0xF8, 0xF8, 0xF8, 0xF8, 0xF0, 0xF0,
0xE0, 0xE0, 0xC0, 0xC0, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0xC0, 0xF0, 0xF8, 0xFC, 0xFE, 0xFF, 0xFF, 0xFF, 0xFF, 0xFD, 0xF8,
0xF1, 0x73, 0x1F, 0x0F, 0x0F, 0x07, 0x07, 0x06, 0x04, 0x07, 0x07, 0x0F, 0x0F, 0x1F, 0x63, 0xF1,
0xF8, 0xFD, 0xFF, 0xFF, 0xFF, 0xFF, 0xFE, 0xFC, 0xF8, 0xF0, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0xF0, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xF9, 0xF9, 0xF9, 0xF9, 0xFF,
0xFF, 0x00, 0x00, 0x00, 0x80, 0x80, 0x80, 0x80, 0x00, 0x80, 0x80, 0x80, 0x80, 0x00, 0x00, 0xFF,
0xFF, 0xF9, 0xF9, 0xF9, 0xF9, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xF0, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x07, 0x7F, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0x7F,
0x7F, 0x00, 0x00, 0x40, 0x7F, 0x4F, 0x0F, 0x03, 0x00, 0x0F, 0x4F, 0x7F, 0x7F, 0x00, 0x00, 0x7F,
0x7F, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0x7F, 0x07, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x07, 0x0F, 0x1F, 0x3F, 0x7F, 0xFF, 0xFF, 0xFF, 0xFF, 0xFC,
0xF8, 0xF8, 0x08, 0x04, 0x00, 0xF8, 0xF8, 0xF8, 0xF8, 0xF8, 0xF8, 0x00, 0x04, 0x08, 0xF8, 0xF8,
0xFC, 0xFF, 0xFF, 0xFF, 0xFF, 0x7F, 0x3F, 0x1F, 0x0F, 0x07, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x01, 0x03, 0x03,
0x07, 0x07, 0x0E, 0x0E, 0x0E, 0x0F, 0x0F, 0x1F, 0x1F, 0x0F, 0x0F, 0x08, 0x08, 0x0C, 0x07, 0x07,
0x07, 0x03, 0x03, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00
};
//***********************************************************************************************
void setup()
{
lcd.begin();
}
//***********************************************************************************************
void loop()
{
// Limpando a tela
lcd.clear();
// A diferenca aqui para o LCD normal é q no LCD normal é caracter e aqui é pixel
lcd.setCursor(40, 1);
// Desenhando a img
lcd.draw(logo, 48, 48);
delay(1000);
lcd.clear();
lcd.setFontSize(FONT_SIZE_SMALL);
lcd.println("Ola, Mundo!");
lcd.setFontSize(FONT_SIZE_MEDIUM);
lcd.println("Ola, Mundo!");
delay(1000);
lcd.clear();
lcd.setCursor(0, 0);
lcd.setFontSize(FONT_SIZE_SMALL);
lcd.printLong(12345678);
delay(1000);
lcd.clear();
lcd.setCursor(0, 0);
lcd.setFontSize(FONT_SIZE_MEDIUM);
lcd.printLong(12345678);
delay(1000);
lcd.clear();
lcd.setCursor(0, 0);
// Nesta biblioteca funciona apenas para printLong
lcd.setFontSize(FONT_SIZE_LARGE);
lcd.printLong(12345678);
delay(1000);
lcd.clear();
lcd.setCursor(0, 0);
// Nesta biblioteca funciona apenas para printLong
lcd.setFontSize(FONT_SIZE_XLARGE);
lcd.printLong(12345678);
delay(1000);
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
# Teclado matricial (Membrana)

No teclado 4x4 (16 teclas) temos 4 linhas e 4 colunas, onde temos os terras nos pinos 5 ao 8 e as entras digitais 1 ao 4.
No teclado 4x3 (12 teclas) temos 4 linhas e 2 colunas, onde temos os terras nos pinos 5 ao 7 e as entras digitais 1 ao 4.
No teclado 1x4 (4 teclas) temos 1 linhas e 4 colunas, onde temos o terra no pino 1 e as entras digitais 2 ao 5.
Caso os pinos nao funcionem usar um multimetro para saber os pinos dos botoes.
Exemplo sem biblioteca
// A ordem dos pinos com as portas [linha 1, linha 2, linha 3 e linha 4]
int pinosLinhas[] = {11,10,9,8};
// A ordem dos pinos com as portas [coluna 1, coluna 2, coluna 3 e coluna 4]
int pinosColunas[] = {7,6,5,4};
char teclas[4][4] = {{'1','2','3','A'},
{'4','5','6','B'},
{'7','8','9','C'},
{'*','0','#','D'}};
void setup()
{
for (int nL = 0; nL <= 3; nL++) {
pinMode(pinosLinhas[nL], OUTPUT);
digitalWrite(pinosLinhas[nL], HIGH);
}
for (int nC = 0; nC <= 3; nC++) {
pinMode(pinosColunas[nC], INPUT_PULLUP);
}
Serial.begin(9600);
Serial.println("Teclado 4x4");
Serial.println("Aguardando acionamento das teclas...");
Serial.println();
}
void loop()
{
//faz varredura em todas as linhas, desligando uma de cada vez
for (int nL = 0; nL <= 3; nL++)
{
digitalWrite(pinosLinhas[nL], LOW);
//faz varredura em todas as colunas verificando se tem algum botao apertado
for (int nC = 0; nC <= 3; nC++) {
if (digitalRead(pinosColunas[nC]) == LOW)
{
Serial.print("Tecla: ");
Serial.println(teclas[nL][nC]);
while(digitalRead(pinosColunas[nC]) == LOW){}
}
}
digitalWrite(pinosLinhas[nL], HIGH);
}
delay(10);
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
Exemplo com biblioteca, baixar aqui
#include <Keypad.h>
byte pinosLinhas[] = {10,5,6,8};
byte pinosColunas[] = {9,11,7};
char teclas[4][3] = {{'1','2','3'},
{'4','5','6'},
{'7','8','9'},
{'*','0','#'}};
// Cria uma instancia do tipo Keypad
// A funcao Keypad recebe como parametro 1 o array de teclas, 2 o pinos das linhas
// Como 3 o pinos das colunas, como 4 a quantidade de linhas e no 5 a quantidade de colunas
Keypad teclado1 = Keypad( makeKeymap(teclas), pinosLinhas, pinosColunas, 4, 3);
void setup() {
Serial.begin(9600);
Serial.println("Teclado 4x4 com Biblioteca Keypad");
Serial.println("Aguardando acionamento das teclas...");
Serial.println();
}
void loop() {
//Verifica se alguma tecla foi pressionada
char tecla_pressionada = teclado1.getKey();
//Mostra no serial monitor o caracter da matriz,
//referente a tecla que foi pressionada
if (tecla_pressionada)
{
Serial.print("Tecla: ");
Serial.println(tecla_pressionada);
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
# Sleep Mode
Colocar o arduino para dormir diminuindo o consumo da bateria
// Biblioteca
#include <avr/sleep.h>
const pinoBotao 2;
const pinoLed 7;
bool estadoBUILTIN = false;
// Declarando a funcao
void mimi();
void setup() {
Serial.begin(9600);
Serial.println("Iniciando setup()");
pinMode(pinoLed, OUTPUT);
pinMode(LED_BUILTIN, OUTPUT);
pinMode(pinoBotao, INPUT_PULLUP);
digitalWrite(pinoLed, LOW);
Serial.println("Fim setup()");
}
void loop() {
Serial.println("Ligando o LED");
digitalWrite(pinoLed, HIGH);
delay(5000);
Serial.println("Partiu mimi");
digitalWrite(pinoLed, LOW);
mimi();
Serial.println("Arduino Acordado!");
estadoBUILTIN = !estadoBUILTIN;
digitalWrite(LED_BUILTIN, estadoBUILTIN);
delay(2000);
}
void mimi() {
// Se nao for a low da erro e trava
attachInterrupt(digitalPinToInterrupt(pinoBotao), disperta, LOW);
set_sleep_mode(SLEEP_MODE_PWR_DOWN);
sleep_enable();
delay(1000);
sleep_cpu();
}
void disperta() {
Serial.println("Interrupção ativada, acordando arduino");
sleep_disable();
detachInterrupt(digitalPinToInterrupt(pinoBotao) );
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
← Modulos Introducao →